Modality Configuration Details
CAV
- Camera:
- category:
RGB camera - resolution:
640×480 - fov:
110 - transforms in CARLA world:
- camera0: {x: 1.5 m, z: 2.4 m, yaw: 0°} (front)
- camera1: {x: -1.5 m, z: 2.4 m, yaw: 180°} (rear)
- camera2: {x: 0, y: -0.7 m, z: 2.4 m, yaw: -90°} (left)
- camera3: {x: 0, y: 0.7 m, z: 2.4 m, yaw: 90°} (right)
- category:
- LiDAR:
- sensing range:
120 m - channels:
64 - upper_fov:
2 - lower_fov:
-25 - transform: {x: 0, z: 2.5 m}
- sensing range:
- IMU:
- noise model
- acceleration: standard deviation of 0.1 m/s^2 for X,Y and Z axes
- gyroscope: standard deviation of 0.002 rad/s for X,Y and Z axes
- noise model
- GNSS:
- noise model
- altitude: standard deviation of 0.005 m
- latitude and longitude: standard deviation of 1e-5°, leading to a 2-5 m localization bias
- heading direction: standard deviation of 0.1°
- speed: standard deviation of 0.2 m/s
- noise model
RSU
- Camera:
- category:
RGB camera - resolution:
640×480 - fov:
110 - transform: {x: 0, y: 0, z: 3.9 m}
- category:
- Depth Camera:
- category:
Depth camera - image_size_x:
640 - image_size_y:
480 - fov:
110 - transform: {x: 0, y: 0, z: 3.9 m}
- category:
- LiDAR:
- sensing range:
120 m - channels:
64 - upper_fov:
2 - lower_fov:
-25 - transform: {x: 0, z: 4 m}
- sensing range:
- Radar:
- horizontal_fov:
110 - vertical_fov:
30 - range:
100 - transform: {x: 0, z: 4.1 m}
- horizontal_fov:
Channel
- Multipath complex gain \(a\)
- Multipath delay \(\tau\)
- Multipath azimuth and elevation AoA and AoD \(\{\theta,\phi\}_{\mathrm{t},\mathrm{r}}\) from the local perspective of the transceiver.
- Global multipath azimuth and elevation AoA and AoD \(\{\theta,\phi\}_{\mathrm{t},\mathrm{r}}\) from the global coordinate system (GCS).
The baseband complex gain \(a\) is of dimension [batch_size, num_rx, num_rx_ant, num_tx, num_tx_ant, num_paths, num_time_steps]. In our case we have no batch and 1 tx to 1 rx, which produces [1, 1, \(N_{\mathrm{r}}\), 1, \(N_{\mathrm{r}}\), \(M\), 1]
The multipath delay \(\tau\) is of dimension [batch_size, num_rx, num_tx, num_paths]. In our case we have the dimension to be [1, 1, 1, \(M\)]
The four angles have the dimension of [1, 1, 1, \(M\)] as well. From the communication perspective, the angles are computed within a local coordinate system of the planar arrays, which is defined as the figure:
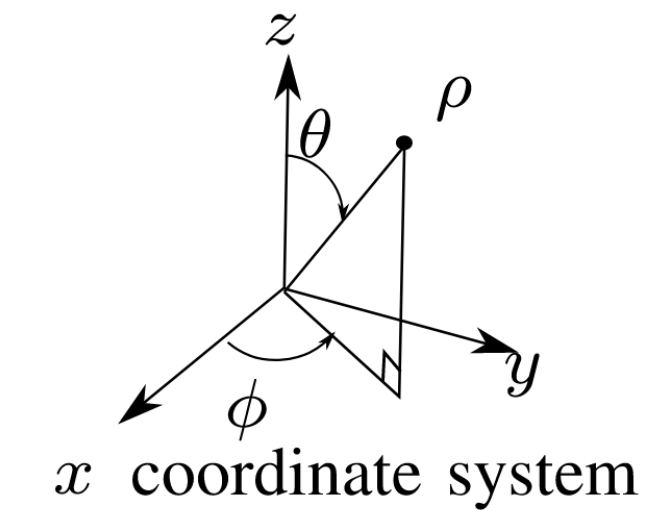
Notably, in Sionna, the planar arrays are defined in y-z plane.
The orignal angle data generated by Sionna when computing the paths. The data of dimension [1, 1, 1, \(M\)] is defined the same way as the figure, but in the GCS.